Professor promove competição com robôs construídos em sala de aula
Estudantes de Engenharia Mecânica do Ifes Campus Aracruz desenvolveram, no primeiro semestre de 2019, o Projeto ARABOT, no qual consistia na construção de um manipulador robótico acoplado a um chassi de robô com direção diferencial capaz de coletar e despachar pequenos objetos. Tendo como foco principal estimular o interesse e a curiosidade dos alunos ao trazer uma abordagem diferenciada aos conteúdos de sala de aula ao adotar uma metodologia de aprendizado baseado em projetos, além de propiciar aos estudantes experimentarem com tecnologias de ponta amplamente utilizadas em robótica industrial e carros autônomos.
O Projeto Interdisciplinar coordenado pelo Professor Dr. Avelino Forechi, teve participação de quatro equipes formadas cada uma por dois grupos de alunos do primeiro período de Engenharia Mecânica matriculados na disciplina de Algoritmos e Estrutura de Dados, responsáveis pela montagem do manipulador robótico e do chassi. As equipes eram compostas também por grupos de estudantes de períodos mais avançados e em fase de conclusão, matriculados nas disciplinas de Introdução à Robótica e Pesquisa Operacional. Juntos tinham o objetivo de planejar/acompanhar, projetar e programar um robô para desempenhar da forma mais eficiente uma missão na competição realizada ao final do semestre. Segundo o professor, foi determinante “o apoio da Coordenadoria de Engenharia Mecânica ao aceitar [sua] proposta de disciplina para tópico especial e dividir a turma de Algoritmos e Estrutura de Dados em dois grupos para permitir o bom andamento das aulas práticas.”
Para a montagem dos robôs, os estudantes de Algoritmos e Estrutura de Dados foram divididos em oito grupos para utilização dos kits fornecidos pelo professor, além de diversos componentes eletrônicos financiados pelo campus, passando também pelo projeto de circuitos eletrônicos para o micro controlador Arduino e a implementação de algoritmos em C/C++ para leitura de dados de sensores e controle de atuadores. A Equipe C3-11-5 contou um pouco da sua experiência com o projeto: “O projeto foi muito interessante pois pudemos aplicar tudo que aprendemos nas aulas teóricas em um ambiente muito divertido. Isso é fundamental para os alunos pois geralmente as matérias/cursos de programação ensinam só a parte teórica e não passam nenhuma aplicação, então fica uma coisa muito vazia. Com esse projeto aprendemos um pouco como funciona o ambiente de um programador e os principais desafios que os mesmos enfrentam. Aprendemos também como é importante e fundamental o trabalho em equipe e, assim, desenvolver habilidades de relacionamento e trabalho em grupo.”
Os estudantes de Introdução à Robótica, no papel de projetistas, tiveram a missão de realizar a modelagem 3D dos robôs em softwares de desenho como SolidWorks e Autodesk F360, além de sua exportação para o ambiente simulado ROS/Gazebo. “Entendemos bem os tipos de robôs que existem, quão complexos são a quantidade de graus de liberdade, a atuação dos sensores e das ferramentas de orientação espacial utilizadas para guiar os robôs até que alcancem seus objetivos, mas ressaltamos que o saldo no final foi muito positivo, abriu nosso horizontes para uma área que não conhecíamos.” relatou um integrante da Equipe B2-13-2.
Já os estudantes de Pesquisa Operacional contribuíram no projeto como coordenadores, realizando tanto o planejamento quanto o acompanhamento das atividades desenvolvidas pelos demais grupos de suas equipes, utilizando ferramentas muito difundidas em empresas para gestão de projetos, como o Gráfico de Gantt. A Equipe A1-09-1 destaca que “planejamento também é um ponto que percebe-se de fundamental importância, isto porque as empresas trabalham com prazos estipulados para entrega de seus serviços/produtos, e como geralmente as atividades estão interconectadas, atrasar a execução de uma pode gerar uma sequência de atrasos, podendo comprometer, assim, o prazo final da conclusão do objetivo. Isto pôde ser observado nas atividades dependentes para o funcionamento do robô que tiveram problemas em ser resolvidos, como o funcionamento do Simulink e a Modelagem 3D...” A equipe acrescenta que “de forma geral, percebeu-se que ainda que compreenda-se a finalidade do trabalho e tenha-se uma visão geral dos passos a serem seguidos, podem surgir atividades complementares essenciais que não foram planejadas para que pudessem auxiliar na execução de outras pré-determinadas, como por exemplo a dificuldade que o grupo obteve na modelagem 3D do braço e da base devido o formato do arquivo disponível não ser compatível com os softwares disponíveis. Para resolução deste problema necessitou-se da busca de informações, bem como realizar conversões em softwares auxiliares. ”
Ao final do semestre letivo, após todas as etapas intermediárias de projeto, construção e programação dos robôs vivenciadas em sala de aula, as equipes se reuniram promovendo uma competição divertida em que o objetivo era executar da forma mais eficiente as missões dadas aos seus respectivos robôs. “Foi uma experiência muito dinâmica e o melhor, pude ver como essa experiência foi gratificante. Ver o nosso projeto funcionando! E também percebi como o mundo está aí para reparos e precisa de muita engenharia!”, declara um dos integrantes da Equipe A1-09-1.
Tal projeto apresenta-se como um piloto de inovação didática no campus, onde se pretende organizar edições futuras regularmente dentro das disciplinas de Computação do curso de Engenharia Mecânica, de forma a aprimorá-lo, tanto em sua abordagem pedagógica, quanto na utilização de tecnologias que acompanham as tendências da Indústria 4.0. Segundo o Prof. Avelino “para dar continuidade a este projeto nos próximos anos teremos melhorias na arquitetura de software e hardware, por exemplo para substituir o Arduino chinês Uno R3, que se mostrou muito limitado, por outro microcontrolador com WiFi muito utilizado em Internet das Coisas, além de incorporar novos sensores e algoritmos de planejamento, localização e percepção para traçar rotas e evitar obstáculos.”

Figure 1 - Robôs montados, calibrados e perfilados para a competição

Figure 2 - Conectando a bateria para em seguida testar o robô por completo
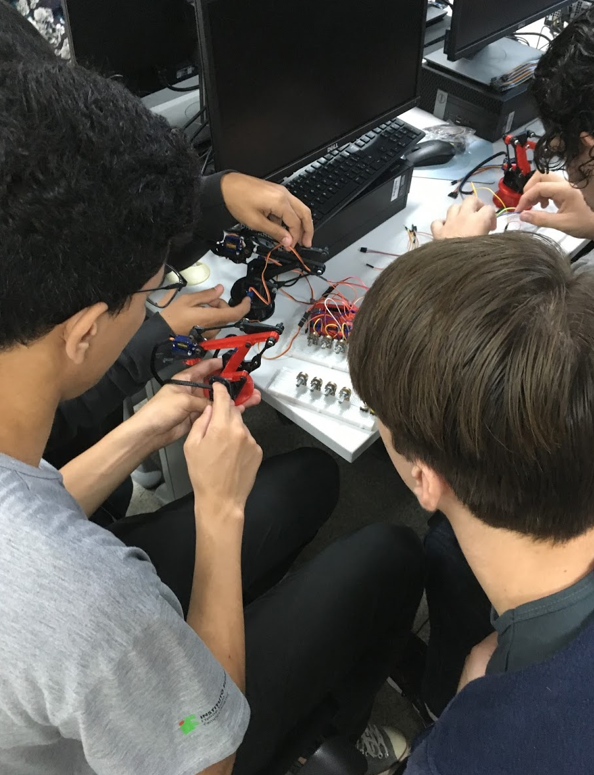
Figure 3 - Montagem do braço robótico e do circuito para controlá-lo por meio de potenciometros
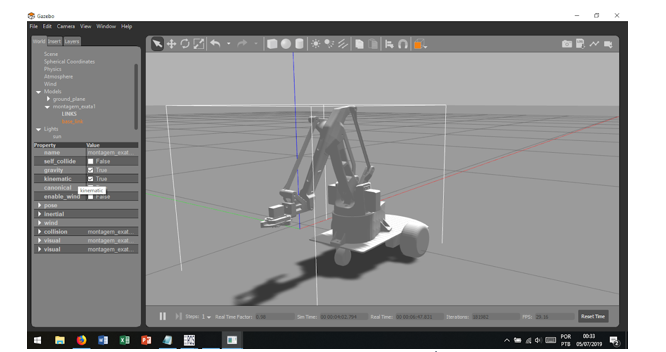
Figure 4 - Modelo 3D feito no SolidWorks e exportado para o formato URDF do ROS/GAZEBO
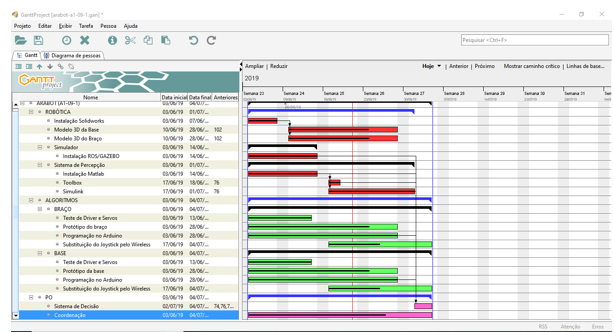
Figure 5 - Cronograma de atividades revisado da equipe A1-09-1
Texto e fotos: Professor Avelino Forechi e aluna Jessica Sales
Redes Sociais